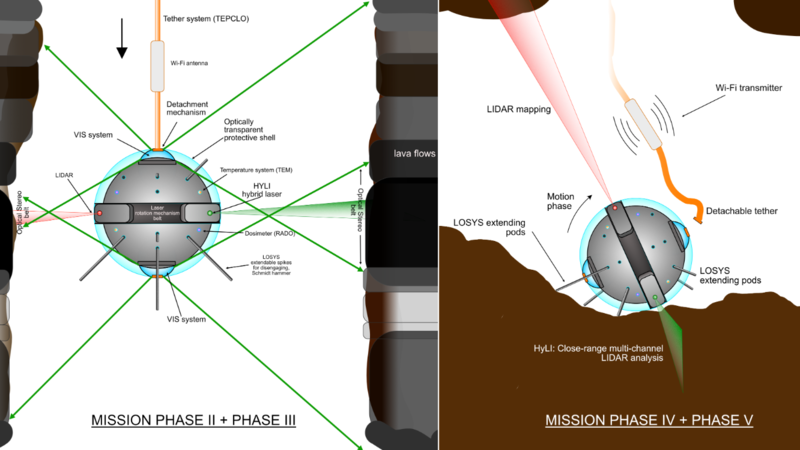
Utilizing tech like LiDAR, “stereo camera vision,” locomotion subsystems with extra “auxiliary housekeeping sensors,” and with its spherical design, DAEDALUS (Descent And Exploration in Deep Autonomy of Lunar Underground Structures) will some time or another create and map 360-degree, 3D models within the Moon’s lunar caves and underground lava tubes.
Designed by a team from Germany’s Julius-Maximilians-Universität of Würzburg (JMU), DAEDALUS will be a transparent sphere (46cm in diameter) with a cable tether at its one end. To use it operators just need to lower it into a cave or tube, using the tether for transmitting data until the sphere robot is released. The objective of this venture here is to decide the assets and conditions accessible in these “subsurface hallways.” If radiation and temperature levels are sufficiently steady, specialists say exoplanetary base-building and maybe even human settlements could be “inside our grip.” And for the same reason, DAEDALUS has a generalist design giving it better adaptability in any type of environment.
That’d surely be an energizing possibility – the Moon is significantly nearer to us than Mars, all things considered. While the latter would, in any case, be the ideal off-planet home for humankind, there’s no damage in searching for nearer options.
This hamster ball-looking robot, DAEDALUS can be brought down beneath the Moon’s surface (through a lava tube) physically, and afterward left to meander indiscriminately. While it’s in this “Rolling Mode,” it will utilize long shafts stretching out from one or the other side to cross the landscape. On the off chance that it runs into any bigger hindrances, these shafts can stretch out to give the bot some additional height, permitting it to move past easily.
The JMU team has effectively sent the model over to the European Space Agency (ESA). But it’s muddled when this clever robot will take shape as a real ESA project and will be sent on a mission.